


Micro robot de prise et dépose d’objets le plus rapide au monde
Des chercheurs et ingénieurs de l’université de Franche-Comté, de Supmicrotech-ENSMM et du CNRS, au laboratoire FEMTO-ST ont développé un robot miniature capable de manipuler des objets micrométriques, à peine visibles à l’œil nu, à des vitesses et précisions jamais atteintes.
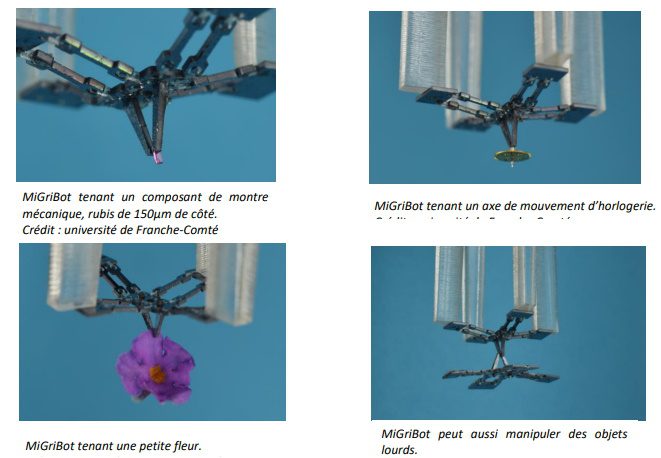
MiGriBot est un robot miniature capable de réaliser des opérations de prise et dépose d’objets submillimétriques avec des vitesses et des précisions inégalées. Il est capable de saisir et de manipuler des micro-objets de 40 µm à plusieurs centaines µm. MiGriBot peut réaliser 720 opérations de prise et dépose par minute, avec une précision inférieure au micromètre. Ces performances font de lui le robot le plus rapide au monde, toutes échelles confondues !
En effet, les robots industriels de prise et dépose les plus rapides ne dépassent pas les 250 cycles par minute. Le robot développé en 2018 par l’université de Harvard est d’une vitesse équivalente à MiGriBot, mais ne possède que trois degrés de mobilité et n’intègre pas la fonction de préhension. L’université de Tokyo a conçu en 2020 un robot miniature de prise et dépose mais dont la vitesse ne dépasse pas les 72 opérations par minute sur une course de 60 µm. Le robot MiGriBot développé par l’équipe RoMoCo de FEMTO-ST est ainsi 10 fois plus rapide sur un déplacement 10 fois plus important de 600 µm.
Un autre avantage de ce robot est que toutes ses mobilités, y compris la micro-pince qui est placée sur l’extrémité articulée, sont actionnées depuis la base du robot, rendant ses parties mobiles très légères. Enfin, sa structure robotique n’occupe qu’une surface de 20 x 20 mm2 . Ce niveau de compacité est obtenu en utilisant du silicium pour les éléments rigides, un polymère (polydiméthylsiloxane – PDMS) comme articulations souples et des actionneurs piézoélectriques dotés de capteurs de position. MiGriBot est donc plus léger, plus compact et plus rapide que les microrobots de manipulation déjà existants.
La vitesse et la précision sont deux enjeux majeurs dans les systèmes automatisés de production et de l’industrie 4.0. Ce robot servira à assembler des systèmes micro-électro-mécaniques et optiques (MEMS/MOEMS) utilisés dans l’industrie de l’électronique où les besoins en cadence de travail sont de plus en plus élevés. Grâce à sa vitesse et à sa compacité, plus de 2000 robots pourront être placés dans 1 m2 pour réaliser plus d’un million d’opérations par seconde ! Augmenter les cadences permet d’améliorer la productivité et la compétitivité des industriels ce qui favorisera la relocalisation de la production en Europe, en Amérique du Nord et dans les pays à haut coût de main d’œuvre. Des applications dans l’industrie horlogère, ’instrumentation médicale, l’aérospatial, ainsi que dans d’autres domaines sont aussi possibles.
Ces travaux ont été menés dans le cadre du projet ANR MiniSoRo (ANR-19-CE10-0004) et ont été partiellement financés par Grand Besançon Métropole
 Si vous avez apprécié cet article, vous aimerez les suivants : ne les manquez pas en vous abonnant à :
Si vous avez apprécié cet article, vous aimerez les suivants : ne les manquez pas en vous abonnant à :




