Comme un oiseau, le nouveau drone de l’EPFL saute pour décoller
Des chercheurs de l’EPFL ont construit un drone capable de marcher, de sauter et de s’envoler à l’aide de pattes d’oiseau, ce qui élargit considérablement la gamme des environnements potentiels accessibles aux véhicules aériens sans pilote.
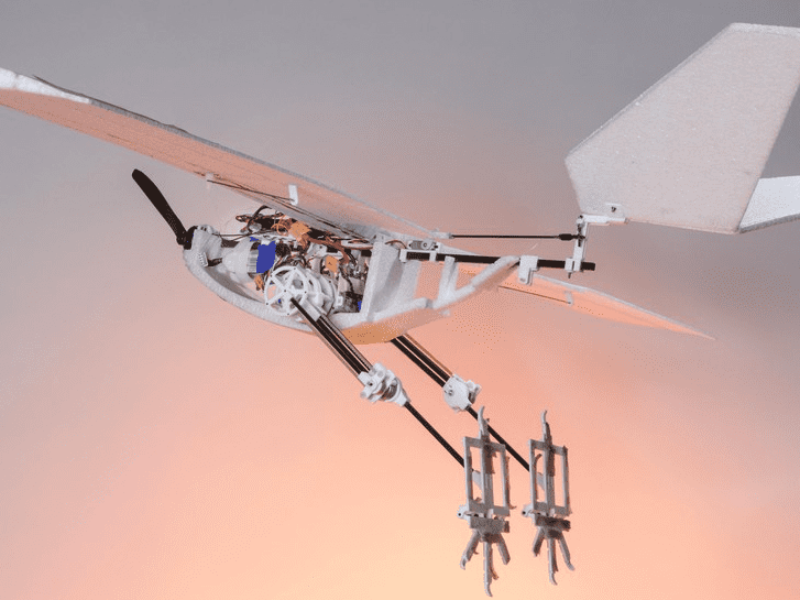
« Le Laboratoire des systèmes intelligents(LIS), dirigé par Dario Floreano, de la Faculté des sciences de l’ingénieur de l’EPFL, a pris cette expression au pied de la lettre avec RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments). Conçu à partir d’oiseaux percheurs comme les corbeaux et les corneilles qui passent fréquemment de l’air à la terre, les pattes robotiques multifonctionnelles lui permettent de décoller de manière autonome dans des environnements jusqu’ici inaccessibles aux drones ailés.
« Les oiseaux ont été à l’origine de la création des avions, et les frères Wright ont réalisé ce rêve, mais même les avions d’aujourd’hui sont encore très loin de ce dont les oiseaux sont capables », explique Won Dong Shin, doctorant en sciences de l’information et de la communication. « Les oiseaux peuvent passer de la marche à la course dans les airs et inversement, sans l’aide d’une piste ou d’un lanceur. Les plateformes d’ingénierie pour ce type de mouvements font encore défaut en robotique. »
La conception de RAVEN vise à maximiser la diversité de la démarche tout en minimisant la masse. Inspiré par les proportions des pattes d’oiseaux (et par de longues observations de corbeaux sur le campus de l’EPFL), Shin a conçu un ensemble de pattes aviaires multi-fonctionnelles sur mesure pour un drone à voilure fixe. Il a utilisé une combinaison de modèles mathématiques, de simulations informatiques et d’itérations expérimentales pour atteindre un équilibre optimal entre la complexité des pattes et le poids total du drone (0,62 kg). La jambe qui en résulte maintient les composants les plus lourds près du « corps », tandis qu’une combinaison de ressorts et de moteurs imite les tendons et les muscles puissants de l’oiseau. Les pieds légers d’inspiration aviaire, composés de deux structures articulées, permettent une articulation élastique passive qui prend en charge diverses postures pour marcher, sautiller et sauter.
« La transposition des pattes et des pieds aviaires en un système robotique léger nous a confrontés à des problèmes de conception, d’intégration et de contrôle que les oiseaux ont résolus avec élégance au cours de l’évolution », explique M. Floreano. « Cela nous a permis non seulement de concevoir le drone ailé le plus multimodal à ce jour, mais aussi de mettre en lumière l’efficacité énergétique du saut pour le décollage chez les oiseaux et les drones. Les travaux de recherche ont été publiés dans la revue Nature.
 Si vous avez apprécié cet article, vous aimerez les suivants : ne les manquez pas en vous abonnant à :
Si vous avez apprécié cet article, vous aimerez les suivants : ne les manquez pas en vous abonnant à :