
Des muscles artificiels permettent à une jambe robotisée de marcher et de sauter
Des chercheurs de l’ETH Zurich et de l’Institut Max Planck pour les systèmes intelligents ont mis au point une jambe robotisée dotée de muscles artificiels.
- Des chercheurs ont mis au point la première jambe robotique dotée de muscles électrohydrauliques artificiels capables de s’adapter automatiquement à un terrain accidenté.
- Le système est plus économe en énergie que les moteurs électriques et permet des sauts importants et des mouvements rapides sans capteurs complexes.
- Bien qu’elle n’en soit qu’à ses débuts, cette technologie offre des possibilités d’applications futures dans le domaine de la robotique douce.
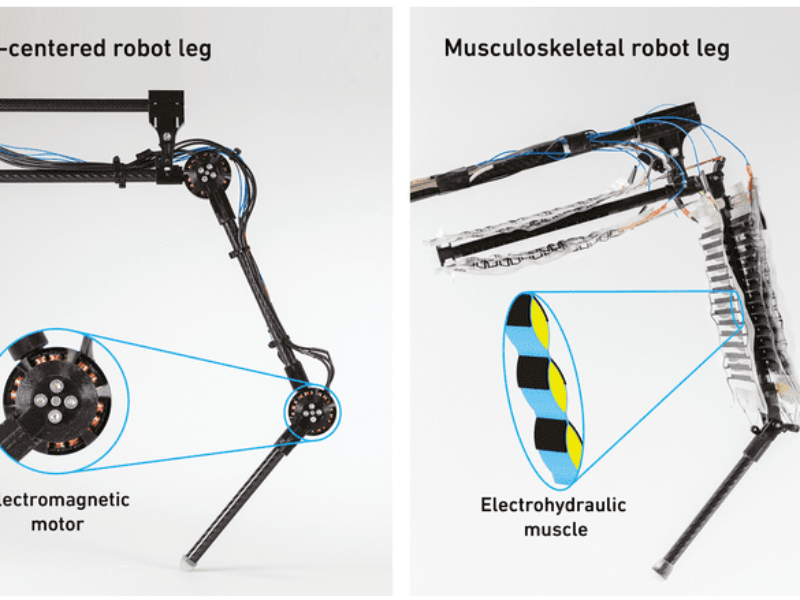
Cela fait près de 70 ans que les inventeurs et les chercheurs développent des robots. À ce jour, toutes les machines qu’ils ont construites, que ce soit pour les usines ou ailleurs, ont un point commun : elles sont mues par des moteurs, une technologie vieille de 200 ans. Même les robots marcheurs ont des bras et des jambes mus par des moteurs, et non par des muscles comme chez les humains et les animaux. Cela explique en partie pourquoi ils n’ont pas la mobilité et l’adaptabilité des créatures vivantes.
Une nouvelle jambe robotique musclée est non seulement plus économe en énergie qu’une jambe conventionnelle, mais elle peut également effectuer des sauts et des mouvements rapides, ainsi que détecter et réagir aux obstacles, le tout sans avoir recours à des capteurs complexes. La nouvelle jambe a été développée par des chercheurs de l’ETH Zurich et de l’Institut Max Planck pour les systèmes intelligents (MPI-IS) dans le cadre d’un partenariat de recherche appelé Max Planck ETH Center for Learning Systems, connu sous le nom de CLS. L’équipe du CLS était dirigée par Robert Katzschmann, du Soft Robotics Lab de l’ETH Zurich, et Christoph Keplinger du MPI-IS. Leurs doctorants Thomas Buchner et Toshihiko Fukushima sont les co-premiers auteurs de la publication de l’équipe. L’équipe vient de publier un rapport sur leur jambe robotique musculo-squelettique inspirée des animaux dans la page externeNatureCommunications .
Chargé électriquement comme un ballon
Comme chez l’homme et l’animal, un muscle extenseur et un muscle fléchisseur permettent à la jambe robotisée de se déplacer dans les deux sens. Ces actionneurs électro-hydrauliques, que les chercheurs appellent HASELs, sont attachés au squelette par des tendons.
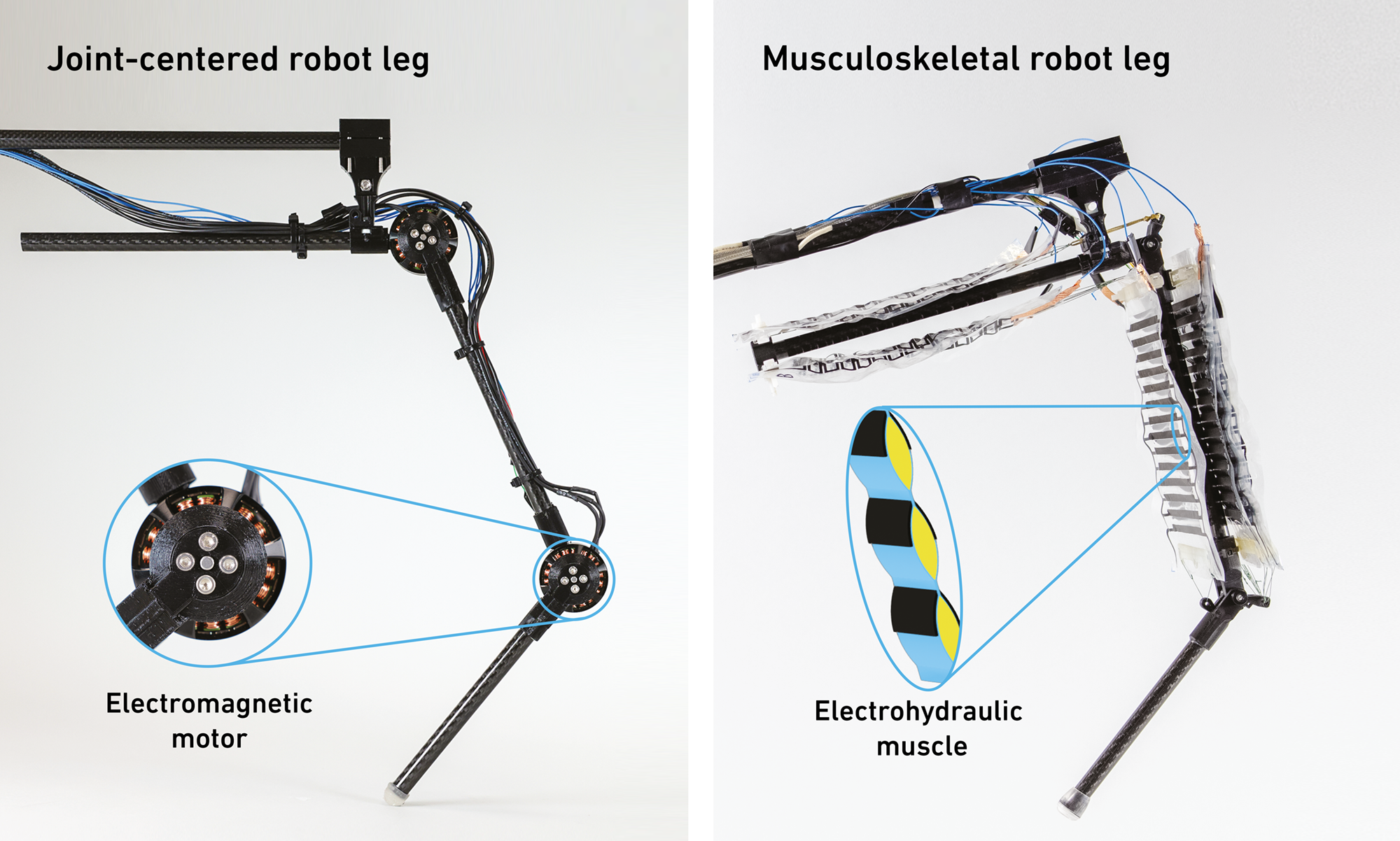
Les actionneurs sont des sacs en plastique remplis d’huile, semblables à ceux utilisés pour fabriquer des glaçons. Environ la moitié de chaque sac est recouverte de chaque côté d’une électrode noire faite d’un matériau conducteur. Buchner explique que « dès que nous appliquons une tension aux électrodes, elles sont attirées l’une vers l’autre par l’électricité statique. De la même manière, lorsque je frotte un ballon contre ma tête, mes cheveux se collent au ballon en raison de cette même électricité statique ». Lorsque l’on augmente la tension, les électrodes se rapprochent et poussent l’huile contenue dans le sac vers un côté, ce qui raccourcit le sac dans son ensemble.
Des paires de ces actionneurs fixés à un squelette produisent les mêmes mouvements musculaires par paires que chez les êtres vivants : lorsqu’un muscle se raccourcit, son homologue s’allonge. Les chercheurs utilisent un code informatique qui communique avec des amplificateurs à haute tension pour contrôler les actionneurs qui se contractent et ceux qui s’allongent.
 Si vous avez apprécié cet article, vous aimerez les suivants : ne les manquez pas en vous abonnant à :
Si vous avez apprécié cet article, vous aimerez les suivants : ne les manquez pas en vous abonnant à :




